
 |
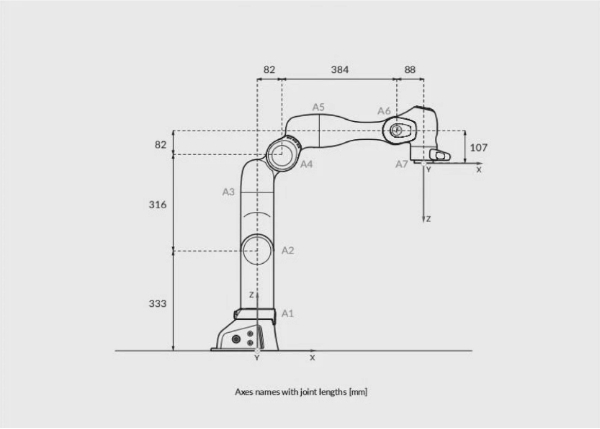
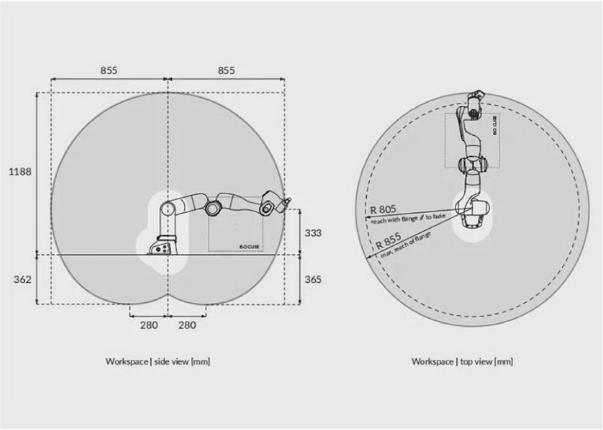
Robotic System The robotic system of Franka Research 3 consists of the manipulator and its controller. The highly sensitive and flexible 7-DOF manipulator is equipped with torque sensors at each joint, with industrial-grade pose repeatability within ±0.1 mm, maintaining minimal trajectory deviation even at high speeds. It has a payload of 3 kg, a reach of up to 855 mm, and a workspace coverage rate of 94.5%. |
 |
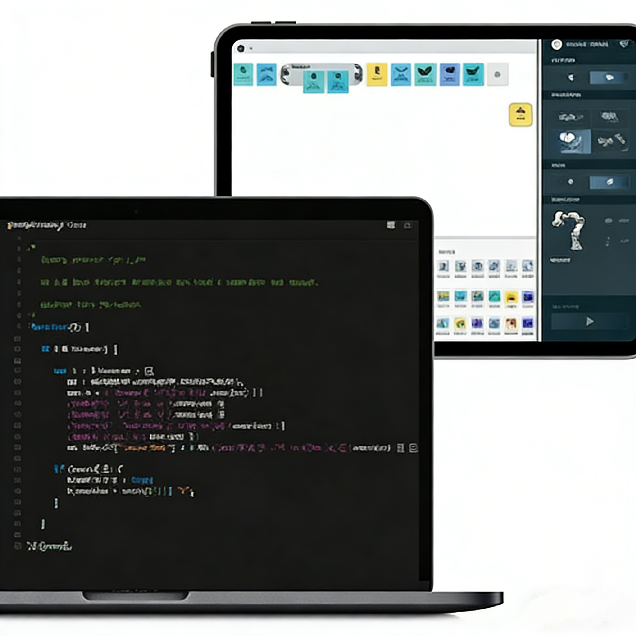
FCI (Franka Control Interface) The FCI is the ideal interface for exploring low-level programming and control schemes. It provides real‑time robot status and enables direct torque control at a 1 kHz update rate. In addition to the C++ interface libfranka, it also integrates with popular ecosystems including ROS, ROS 2, and MATLAB & Simulink. |
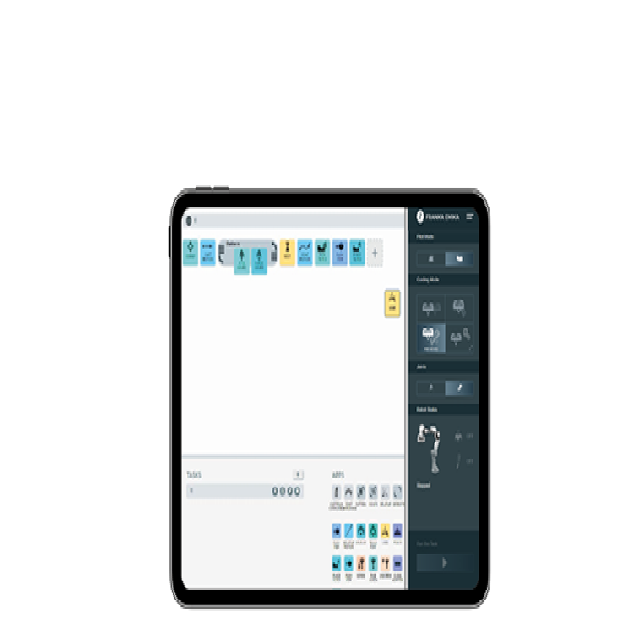 |
DESK Desk is a browser‑based user interface that offers quick robot control options. Applications can be dragged and dropped into a queue to rapidly build complete tasks. It is ideal for quickly prototyping robot behaviors, setting up experiments, and conducting simple human‑robot interaction research and demonstrations. |
 |
Watchman Simple to use, fast to implement safety.Featuring the browser-based user interface Watchman, typically complex safety configurations are now greatly simplified, ensuring your laboratory and laboratory personnel are fully protected. |

“Human and robot intelligence are very different; through interaction, we can combine various skills to accomplish far more tasks than we could when working alone.”
— Leila Takayama,Associate Professor of Human-Computer Interaction, University of California
“We need a new generation of robots to open a new era of robotic applications. Franka Emika lays a solid foundation for overcoming new challenges in real-world robotic applications.”
— Oussama Khatib,Director, Stanford Robotics Laboratory

On all orders over $75.00

Returns are free within 9 days

Contact us 24 hours a day

Your payment are safe with us.